Lixel スキャニングガイドライン
Lixelシリーズ製品を用いたスキャニング業務における実践的なガイドライン。初期化、歩き方、カラー化、RTK、精度検証、マップ統合までを網羅。
上級者向けガイドはこちら1. スキャン全般の注意事項
- 身体を急に回したり、立ち止まったりしないでください。スキャナーに強い加速度や揺れがかかると、点群の精度が低下します。
- スキャナーは常に垂直を保ち、前後左右に傾けないようにしてください。特にRTKモジュール搭載時は信号受信に影響します。
- スキャン中は、スキャナーの1m以内に物体を近づけず、LiDARの視野(FOV)の50%以上を遮らないようにします。
- 屋外で人や車などの動体が多い場合、可能であればLiDARを反対側に向けて避けましょう。
- 室内で複数の部屋や階をスキャンする場合は、すべてのドアを開けておくこと。ドア枠の下では横向きでゆっくり静止し、両側の構造をスキャンできるようにします。
2. スキャナー初期化の流れ
- 初期化時は三脚ではなくスチール製のコントロールポイントベースの使用を推奨します。
- スキャナーを平らな地面に置き、手で安定保持しながら静止状態で起動してください。
- 点群がスマホに表示されてから15秒以上待機してから持ち上げましょう(LixelGO v1.1.1以降ではアプリの指示に従ってください)。
- 初期化中は建物や木などの特徴のある対象物が視野に入る位置が理想です。空き地、反射の強いガラス、動体の多い環境は避けてください。
3. スキャンルートの設計:構造 → 詳細
スキャン範囲の把握
まずはスキャン対象エリア(建物や敷地)を明確にします。
以下の図は「Route not recommended(非推奨ルート)」と表示されていますが、実際には単にスキャンエリアを四角く囲っただけの図であり、歩き方は示されていません。
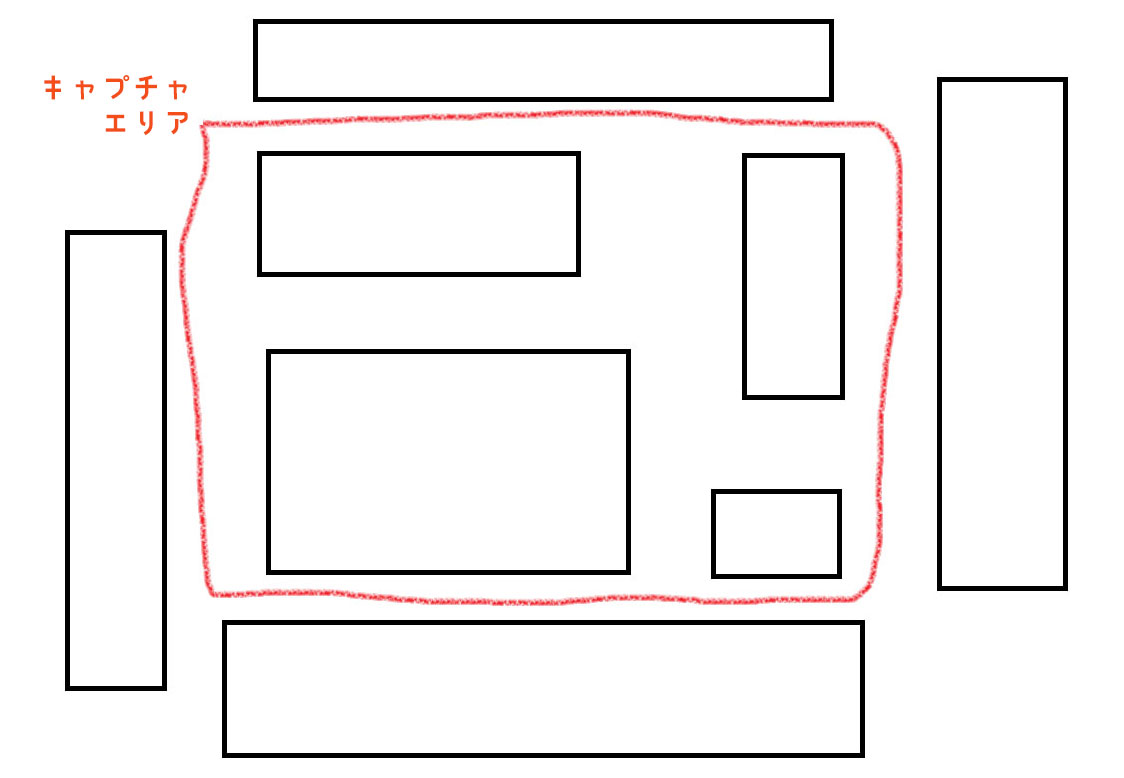
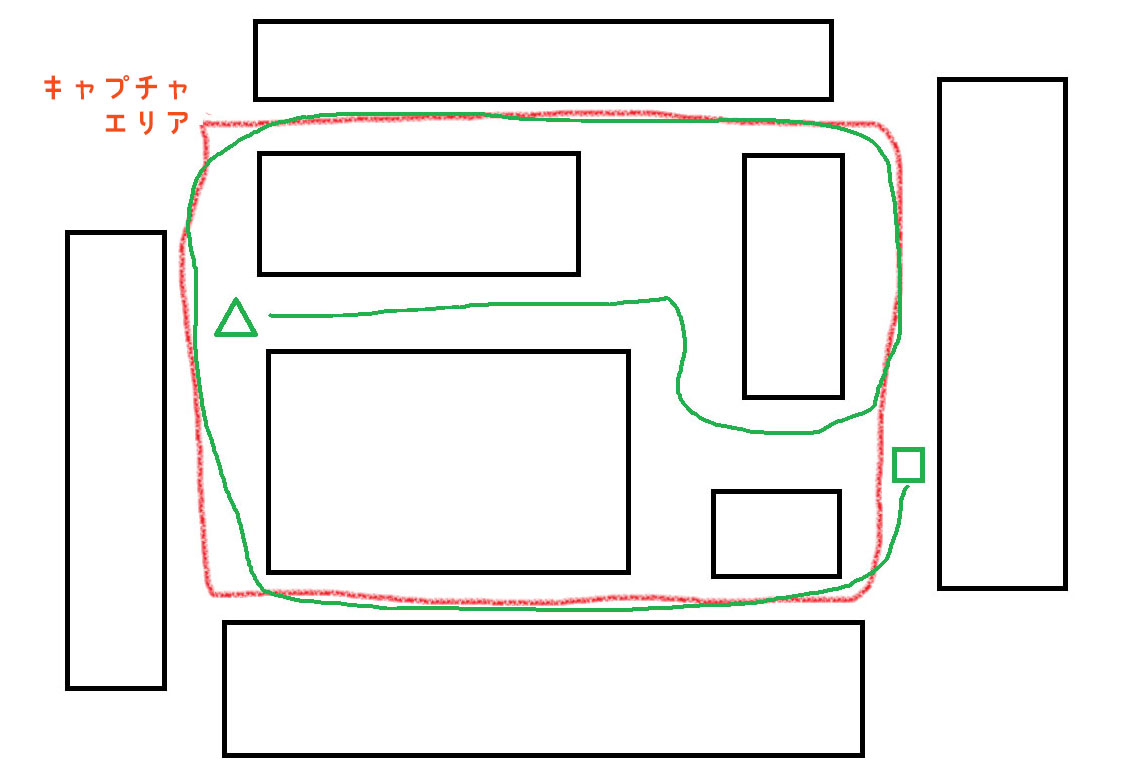
❌ 推奨されないスキャン方法
次の図は、建物の長辺を一直線に移動するのみのルートを示しています。
このようなルート設計ではIMU誤差が蓄積し、点群に層状のズレや歪みが発生する可能性があります。
✅ 推奨されるスキャン方法
以下の図では、全体構造を先に大きく回って把握し、細部を小さなループで補完する推奨ルートが描かれています。
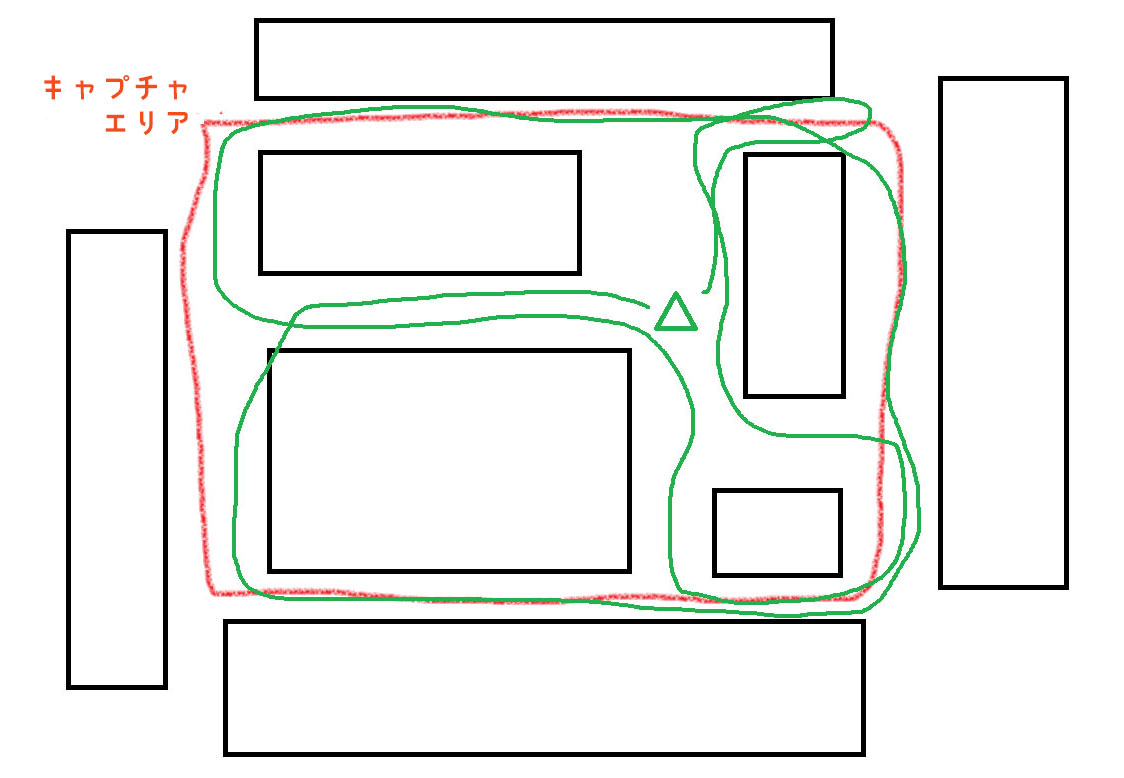
実践ポイント
- 初期化は構造全体が見渡せる場所(図の緑三角)で行う
- 小ループを繰り返すことで誤差蓄積を最小限に抑え、スムーズな点群合成が可能に
- 一部を何度か通ることを恐れず、ループで閉じる意識が大切
4. コントロールポイントの追加(GCP)
- スキャナーを地面に置くとき・拾うときは衝撃を与えず静かに。
- LixelGOで「コントロールポイント追加成功」が表示されたら、1〜2周周囲を歩くか、その場で数秒静止してデータ密度を確保。
- ポイント記録後は15秒以上待ってからプロジェクト終了すること。
- GCP間の推奨距離:
- K1 / L1:50m以内
- L2 / L2 Pro:100m以内
- 直線上に並べないこと(均等配置が理想)
- 廊下などの狭所ではスキャナーを横向きに保持し、FOV内に既知+未知の領域を同時に収めることで点群のつながりが向上。
5. RTKを用いたスキャン
- RTKアンテナは建物や手で遮られないようにし、傾きは20°以内に制限。
- 絶対座標変換(最低限の精度)に必要な条件:
- RTKステータスがFixed
- 移動距離が10m以上
- 使用中の衛星が10基以上
- 精度検証を行う場合:
- スキャン経路は100m以上で、直線でないこと
- RTKステータスは常にFixed状態を維持
- 未固定区間の制限:
- K1:50m未満
- L2 / L2 Pro:100m未満
6. カラー化(Colorization)の注意点
- Insta360などの外部カメラを使用する場合:
- 6K・1秒間隔のタイムラプスモード
- スキャナーとカメラの録画開始タイミングは5秒以内
- スキャン時間は最低2分以上
- スキャナーは常に移動し続ける必要あり(静止不可)
- 暗い環境では照明を追加して均一に照らす
- 過剰な明るさ・逆光・露出オーバーは避ける
- カメラ(パノラマ・内蔵)の視界を遮らないように持ち方に注意
7. 精度検証(Accuracy Verification)
- GCP方式:
- 反射マーカーを貼ったターゲットの周囲を歩いてスキャンしてからポイントを記録
- RTK方式:
- マーカーの周囲を歩くだけでスキャン可能、地面に置く必要なし
8. マップ統合(Map Fusion)
基本条件
- 重複スキャンエリアは15m以上
- 重複箇所は空き地・階段など特徴の少ない場所を避ける
- 各プロジェクトは20分以内
- 統合可能な件数:最大8プロジェクトまで
- 異なる機種間では統合不可(例:K1とL2 ProはNG)
方法①:コントロールポイントによる統合
- 1. プロジェクト1で統合地点に到達したら地面に置く
- 2. 「a」などのコントロールポイントを記録
- 3. 15秒待ってからプロジェクト1を終了
- 4. 地面に置いたままプロジェクト2を開始
- 5. 同じCP名「a」を記録
- 6. プロジェクト1の一部を15m以上再スキャンしてから新領域へ移動
方法②:RTKによる統合
- 全プロジェクトでRTKステータスがFixed状態を維持すること
- 手順は上記とほぼ同じ:
- 終点で終了 → 地面のまま次を開始 → 15m以上オーバーラップ → 新規エリアへ
以上が、Lixel製品による高精度なスキャンを実現するための総合ガイドラインです。
詳細な操作はLixelGOまたはLixelStudioのマニュアルもご参照ください。